Preface: Use-after-free (UAF) vulnerabilities are a class of software flaws that involve using a memory resident object after it has been freed. UAF vulnerabilities most commonly occur when a C++ object that was allocated on the heap is accessed after it is deleted, but stack-allocated objects can also be used after a free.
Background: The Robot Operating System (ROS) is a set of software libraries and tools for building robot applications. From drivers and state-of-the-art algorithms to powerful developer tools, ROS has the open source tools you need for your next robotics project.
Since ROS was started in 2007, a lot has changed in the robotics and ROS community. The goal of the ROS 2 project is to adapt to these changes, leveraging what is great about ROS 1 and improving what isn’t.
The base unit in ROS is called a node. Nodes are in charge of handling devices or computing algorithms – each node for a separate task. Nodes can communicate with each other using topics or services. ROS software is distributed in packages. A single package is usually developed for performing one type of task and can contain one or multiple nodes.
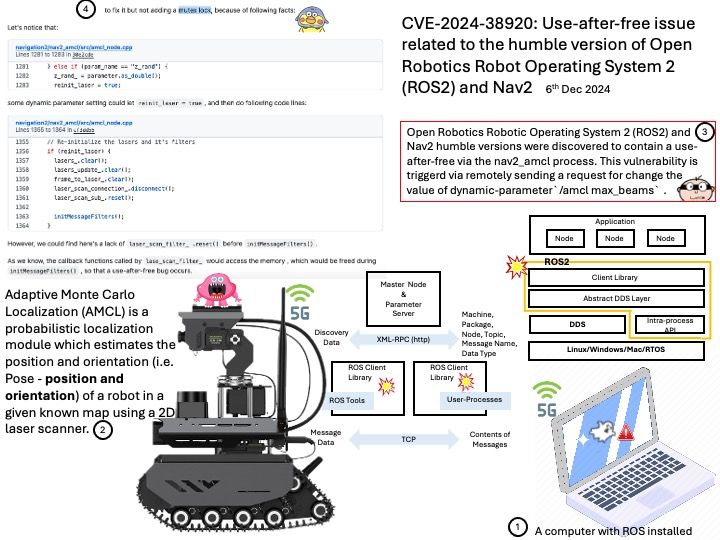
Vulnerability details: Open Robotics Robotic Operating System 2 (ROS2) and Nav2 humble versions were discovered to contain a use-after-free via the nav2_amcl process. This vulnerability is triggerd via remotely sending a request for change the value of dynamic-parameter`/amcl max_beams` .
Official announcement: Please see the link below for details –